

")


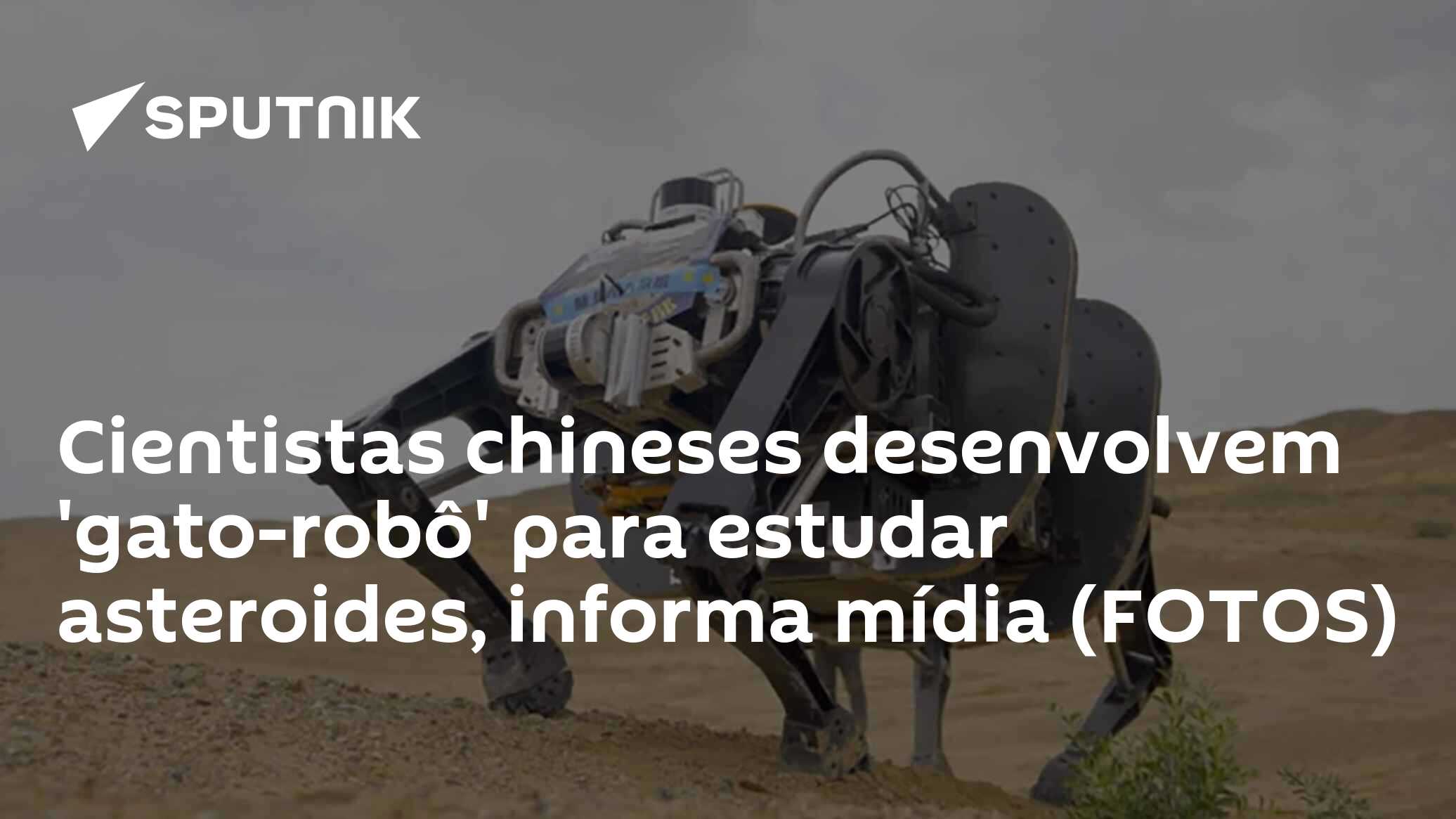
Esse robô quadrúpede possui um sistema de controle denominado “sem modelo”, que utiliza dados de treinamento em tempo real, ao contrário dos métodos convencionais, que se baseiam em modelos matemáticos para coordenação das extremidades. A ideia é que, assim como um gato, que sempre consegue pousar em pé, o robô seja capaz de se equilibrar e se reposicionar no ar para garantir uma aterrissagem eficaz, mesmo em condições de microgravidade.


A relevância dessa tecnologia se destaca quando se considera os desafios enfrentados por veículos tradicionais em pequenas superfícies celestes, como as dos asteroides, que muitas vezes não oferecem a aderência necessária para operações eficazes. Os rovers que nos acostumamos a ver em missões lunares ou marcianas enfrentam dificuldades em terrenos irregulares e com pouca gravidade, limitando a exploração.
De acordo com os pesquisadores, os pequenos corpos celestes, que orbitam o nosso Sistema Solar, não são apenas fascinantes devido aos mistérios que eles guardam sobre a formação do espaço, mas também possuem um alto potencial em termos de recursos naturais, como metais raros e platina. A capacidade de um robô saltador de navegar nesses ambientes desafiadores poderá abrir novas possibilidades para a prospecção e exploração de tais riquezas. Portanto, esse desenvolvimento não apenas representa um avanço tecnológico significativo, mas também pode alterar a forma como a humanidade interage com o espaço, ampliando as fronteiras do que é possível na exploração interplanetária.
